¶ 设备连接
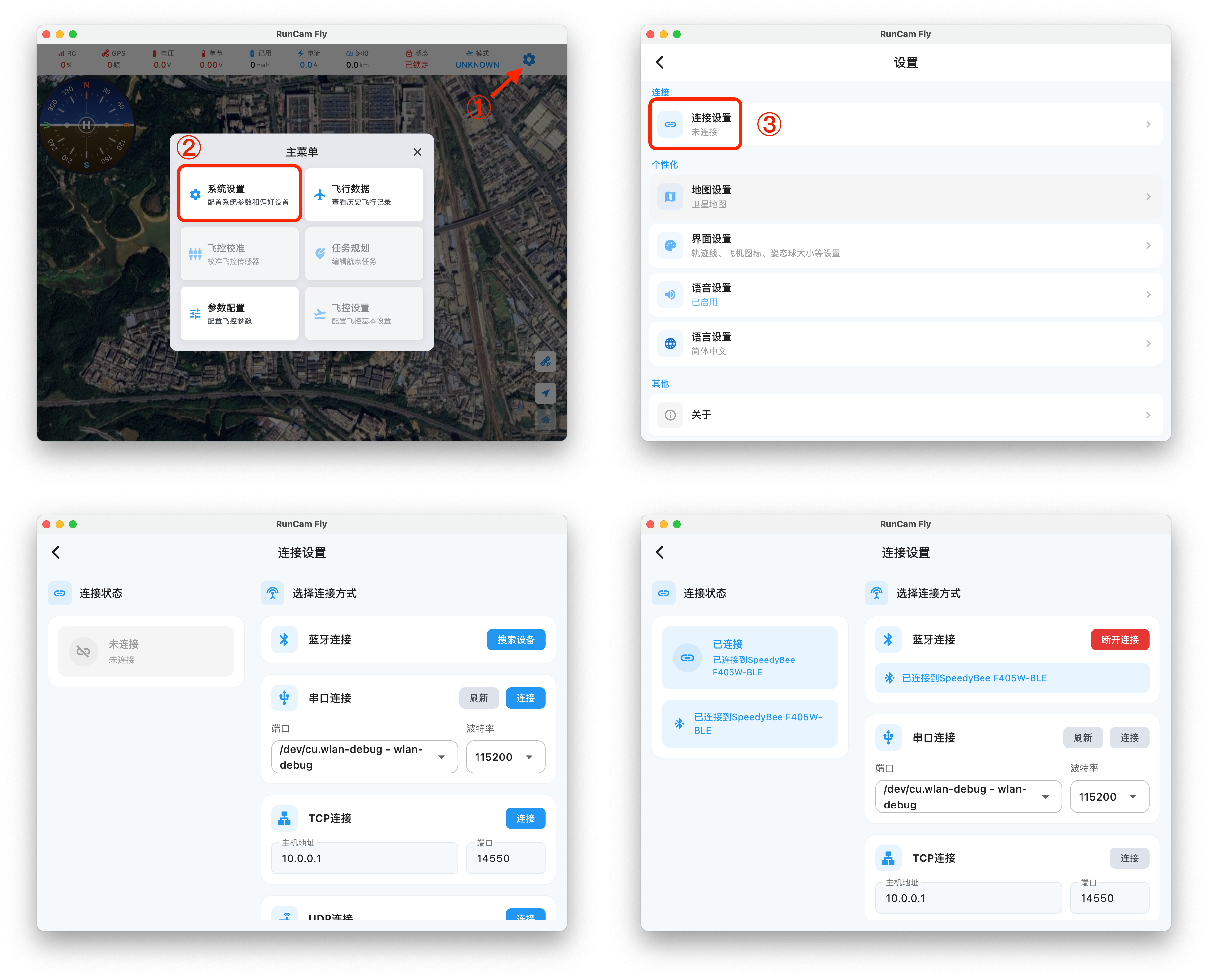
RunCam Fly支持多种方式连接设备,根据您设备支持的类型可以使用高频头蓝牙、串口、Wi-Fi数传TCP/UDP等方式进行连接,下图为连接步骤(以SpeedyBee F405W飞控蓝牙连接为例),连接成功后连接状态将会显示已连接,回到主界面将会进行数据加载。
使用蓝牙连接时,请尽可能将电脑与高频头靠近进行搜索配对;
使用串口连接无法找到对应的串口时,可点击刷新后再尝试连接,若多次尝试无法连接,请排查波特率和连接线缆问题。
¶ 支持的设备
设备回传支持crsf、s.port、msp、mavlink 1、mavlink 2协议中其一,即可使用APP。
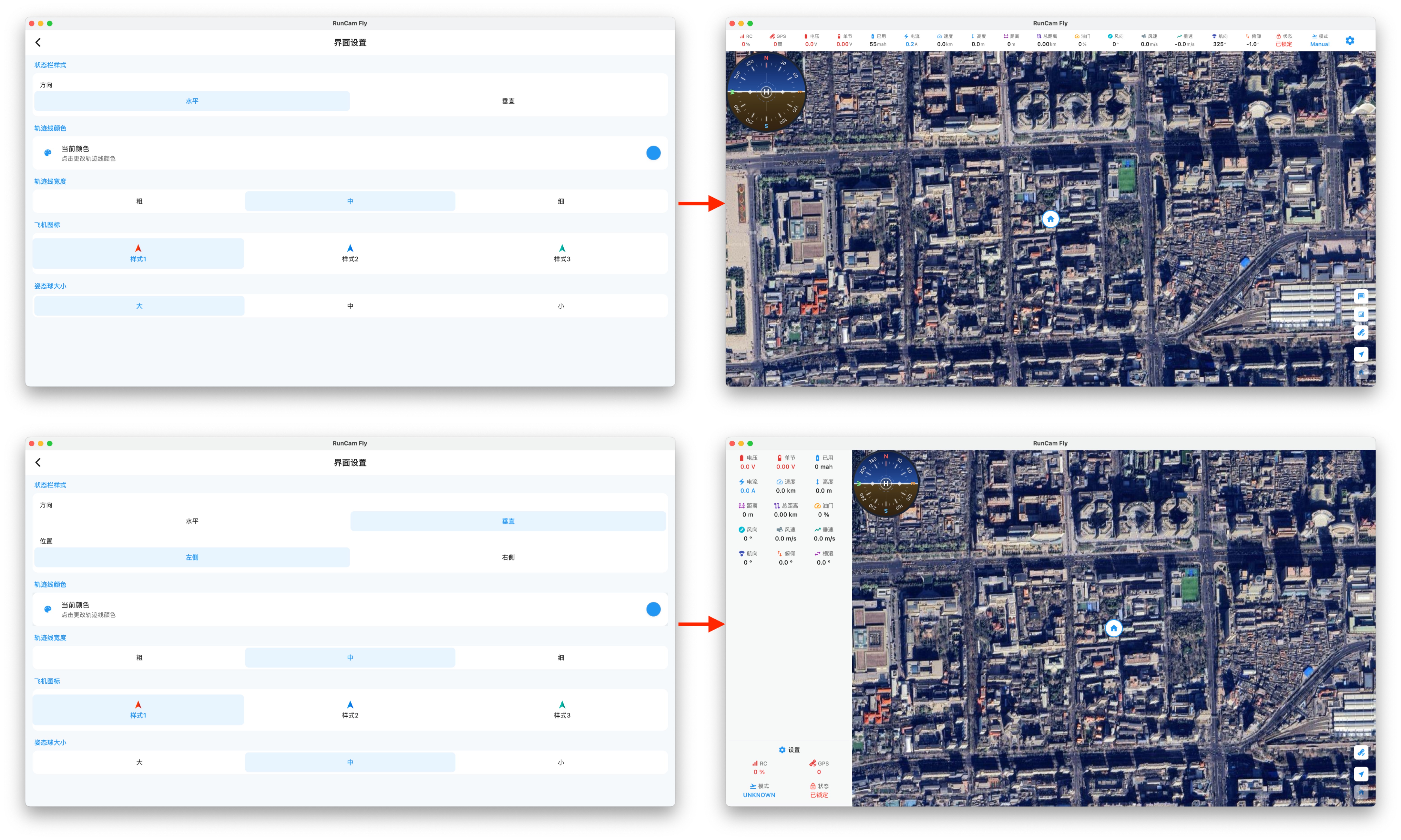
¶ 界面设置
进入路径: 状态栏齿轮⚙️--->系统设置⚙️--->界面设置🎨
RunCam Fly支持设置主界面的状态栏、轨迹线、飞机图标、姿态球等;如下图为水平状态栏与大姿态球效果、左侧垂直状态栏与中姿态球效果。
¶ 状态栏介绍
连接设备后,主界面将有设备数据显示,横向状态栏下未全屏使用或使用移动设备时,状态栏数据可滑动查看。
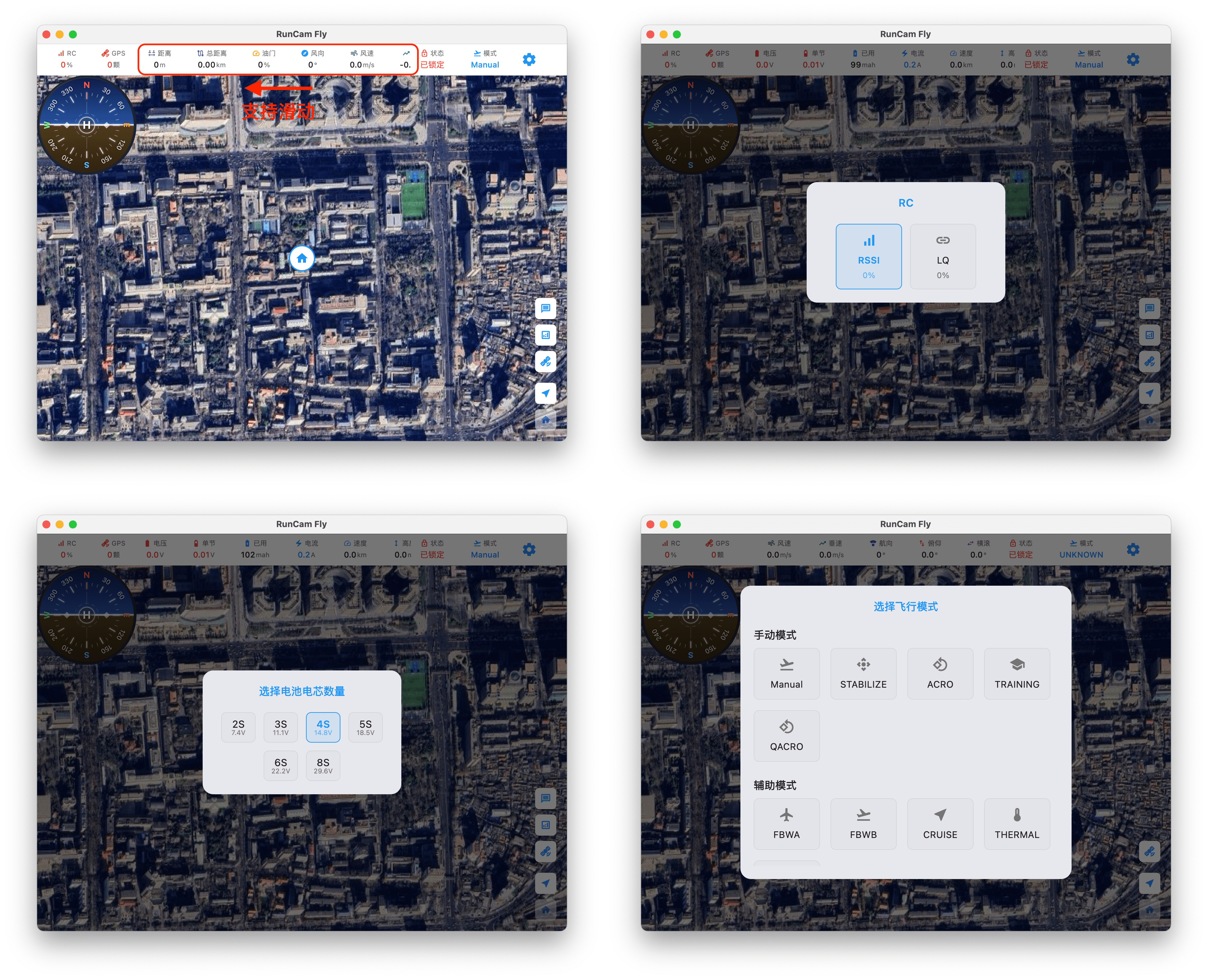
部分数据和模式支持调整,如上图RC、单节电压、飞行模式等,具体支持如下:
| 功能 | 调整内容 |
|---|---|
| RC信号显示 | RSSI(信号强度)、LQ(连接质量) |
| 单节电压 | 电池电芯数量 |
| 速度 | 地速、空速 |
| 高度 | 相对高度、海拔高度 |
| 状态 | 单击锁定与解锁 |
| 飞行模式 | 支持5种手动模式、5种手动模式、8种自动模式、6种四轴模式 |
连接设备后,主界面左下角,第一个按键💬为飞控状态信息。
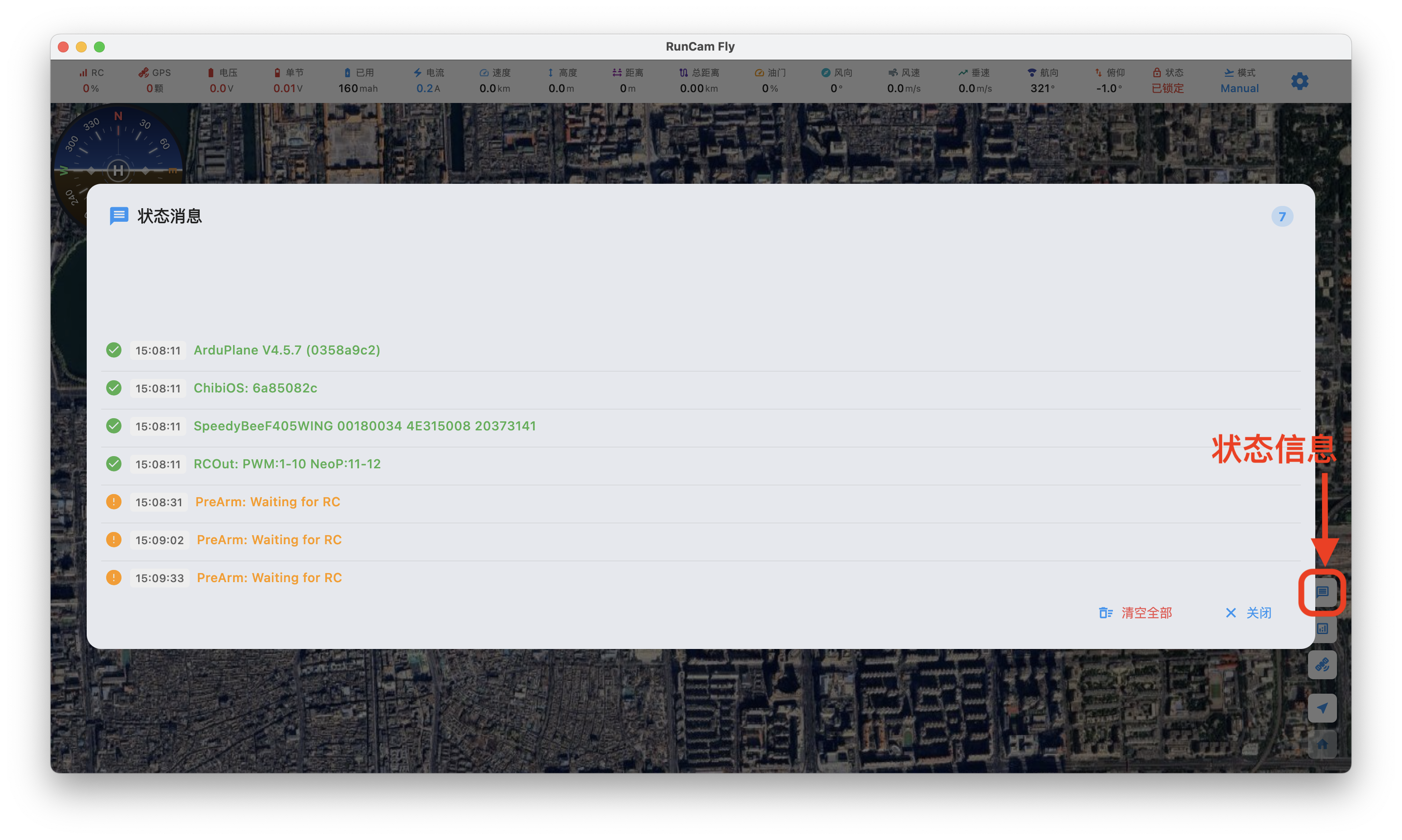
第二个按键📊为更多数据,可向下滑动,包含位置信息、GPS状态、飞行状态、电池信息、系统状态、传感器状态、飞行性能、环境数据。

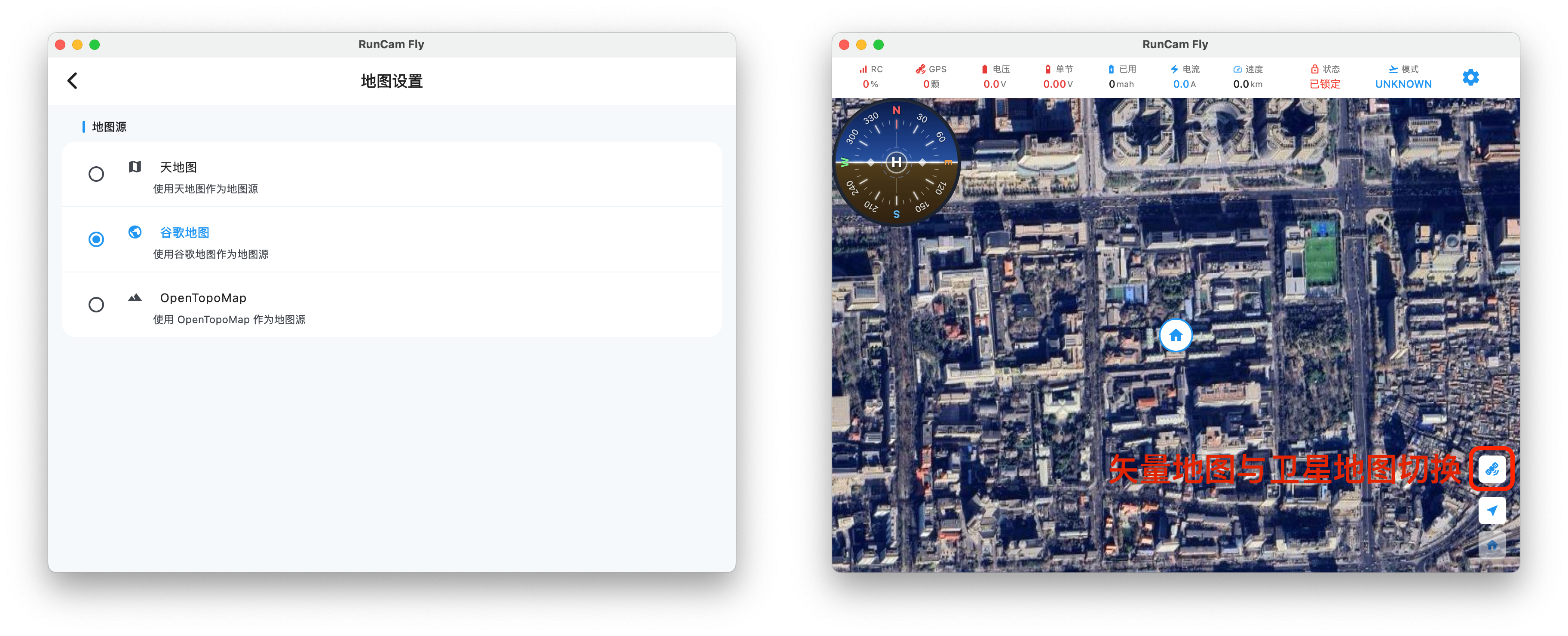
¶ 地图设置
进入路径: 状态栏齿轮⚙️--->系统设置⚙️--->地图设置🗺️
RunCam FLY支持设置天地图、谷歌地图、OpenTopoMap三种地图源,点击主界面右下角卫星🛰️图标可切换矢量地图与卫星地图,实时显示飞行轨迹,并支持地图自动跟随模式
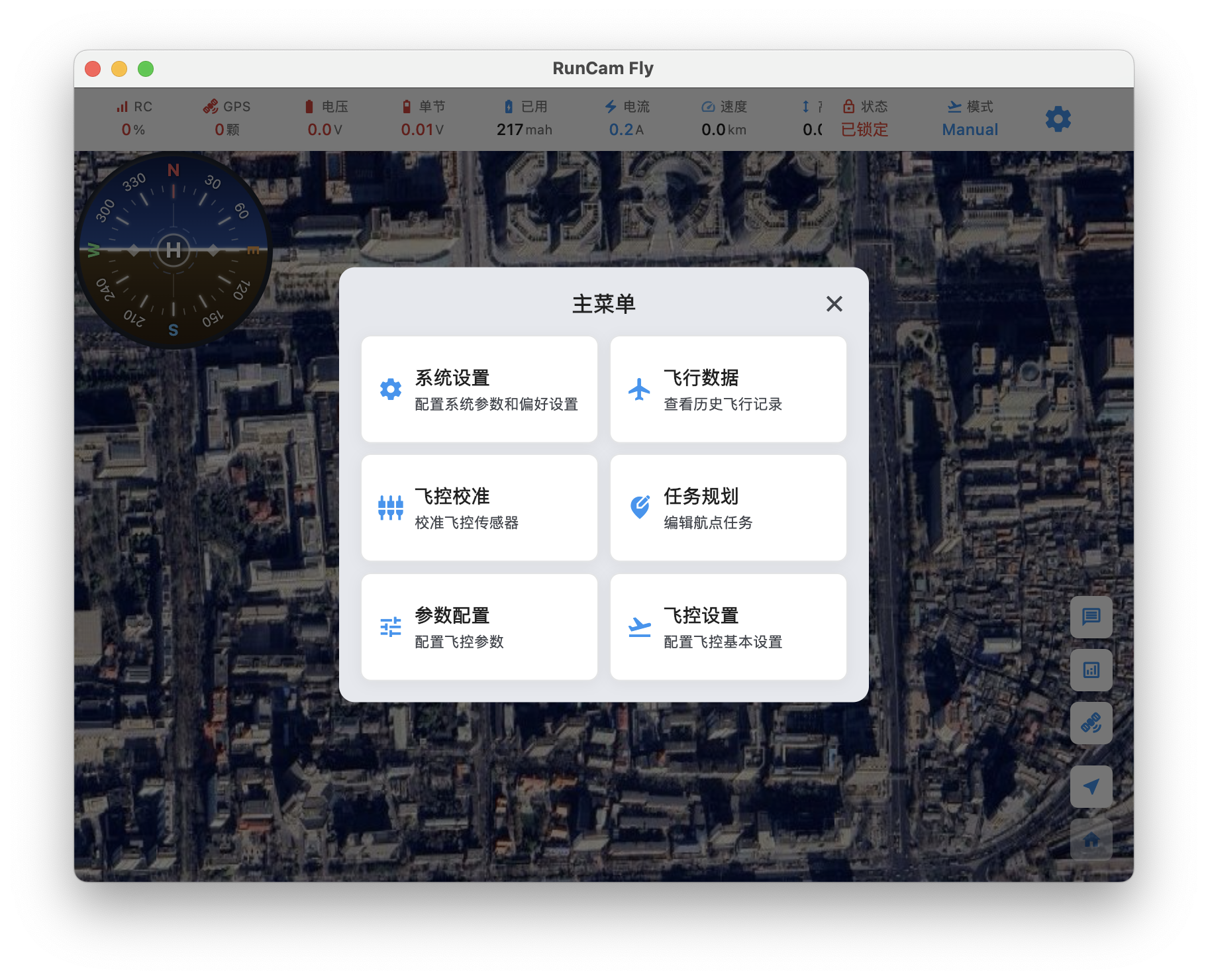
¶ 主菜单介绍
点击状态栏齿轮⚙️图标进入主菜单,主菜单各项设置将在下方章节逐个介绍。
¶ 系统设置--配置系统参数与偏好
设备连接、地图设置、界面设置均已在前章节介绍,除此之外还可以设置语音提示和软件语言,智能语音提醒飞行状态、电池电量、信号丢失等重要信息,确保飞行安全。

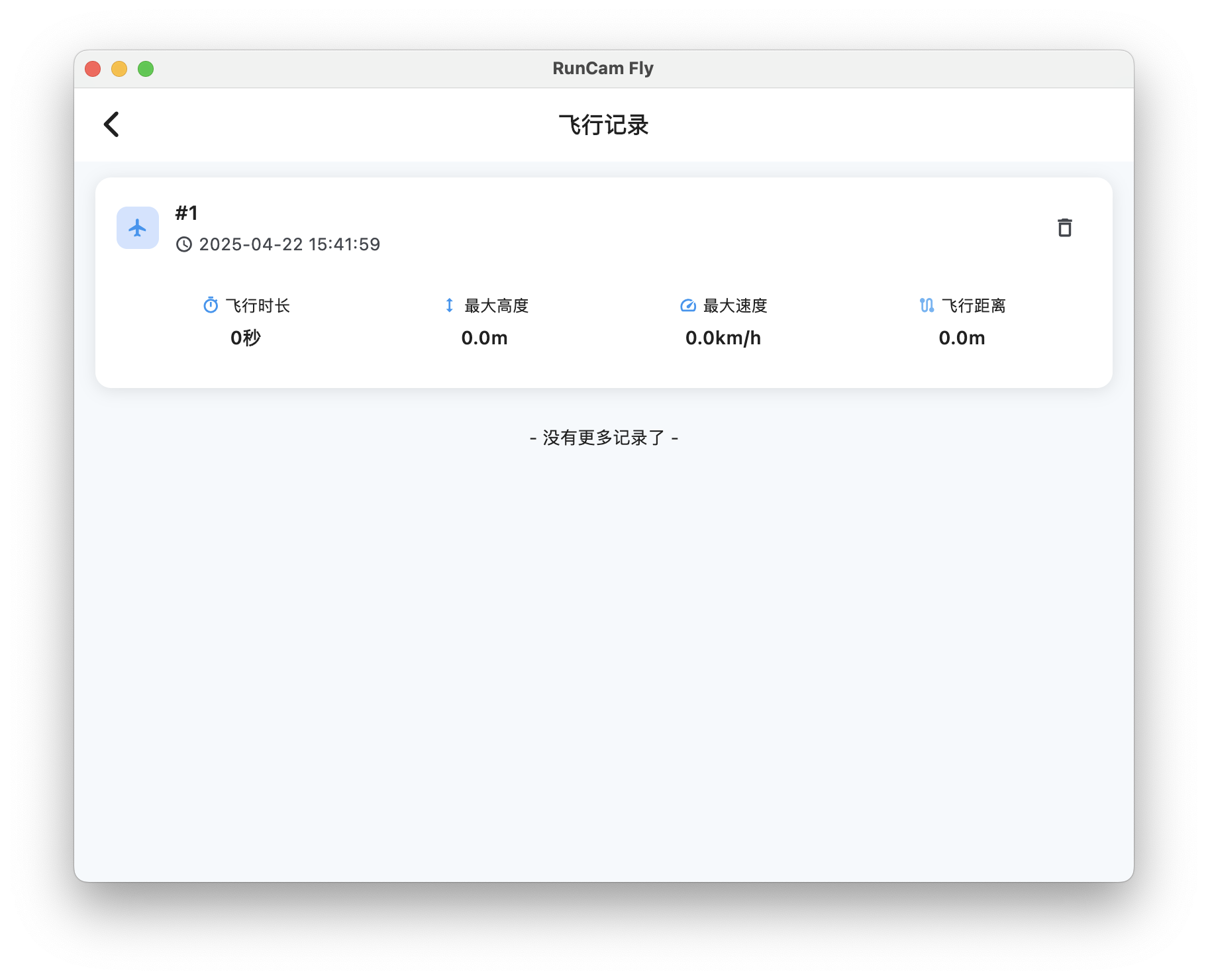
¶ 飞行数据--查看历史飞行记录
使用RunCam FLY进行飞行后,飞机数据将会被记录至飞行记录中,可自行查看或删除。
🔒为保护您的隐私,飞行数据均为本地存储,不上传至任何云端。
¶ 飞控校准--校准飞控传感器
支持校准加速度计、水平姿态、罗盘、遥控器输入、空速计,选择需要校准项目后点击开始校准即可开始,相关注意事项如下。
需使用支持双向mavlink数传的设备
| 校准项目 | 注意事项 |
|---|---|
| 加速度计 | 在每个步骤中保持您的飞行器稳定且静止,然后再继续 |
| 水平姿态 | 开始前确保您的飞行器稳定在水平面上,过程中请勿倾斜或移动 |
| 罗盘 | 按指示中所有轴上缓慢旋转飞行器,远离金属和电子设备等干扰物,尽可能中空旷地进行校准 |
| 空速计 | 需要盖住皮托管 |

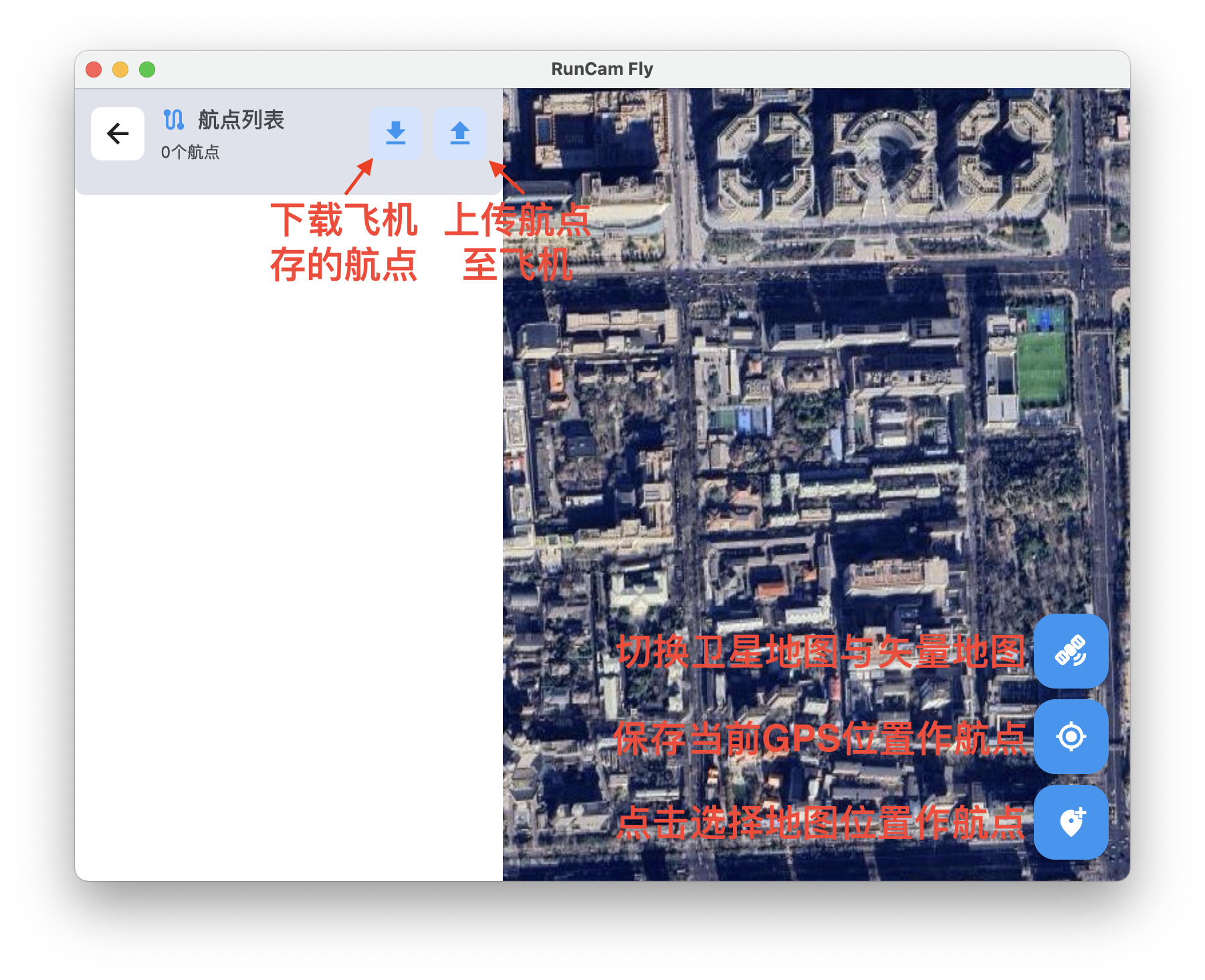
¶ 任务规划--编辑航点任务
可视化航点任务编辑,支持多种航点类型,一键上传飞行任务,具体操作按键如下图。
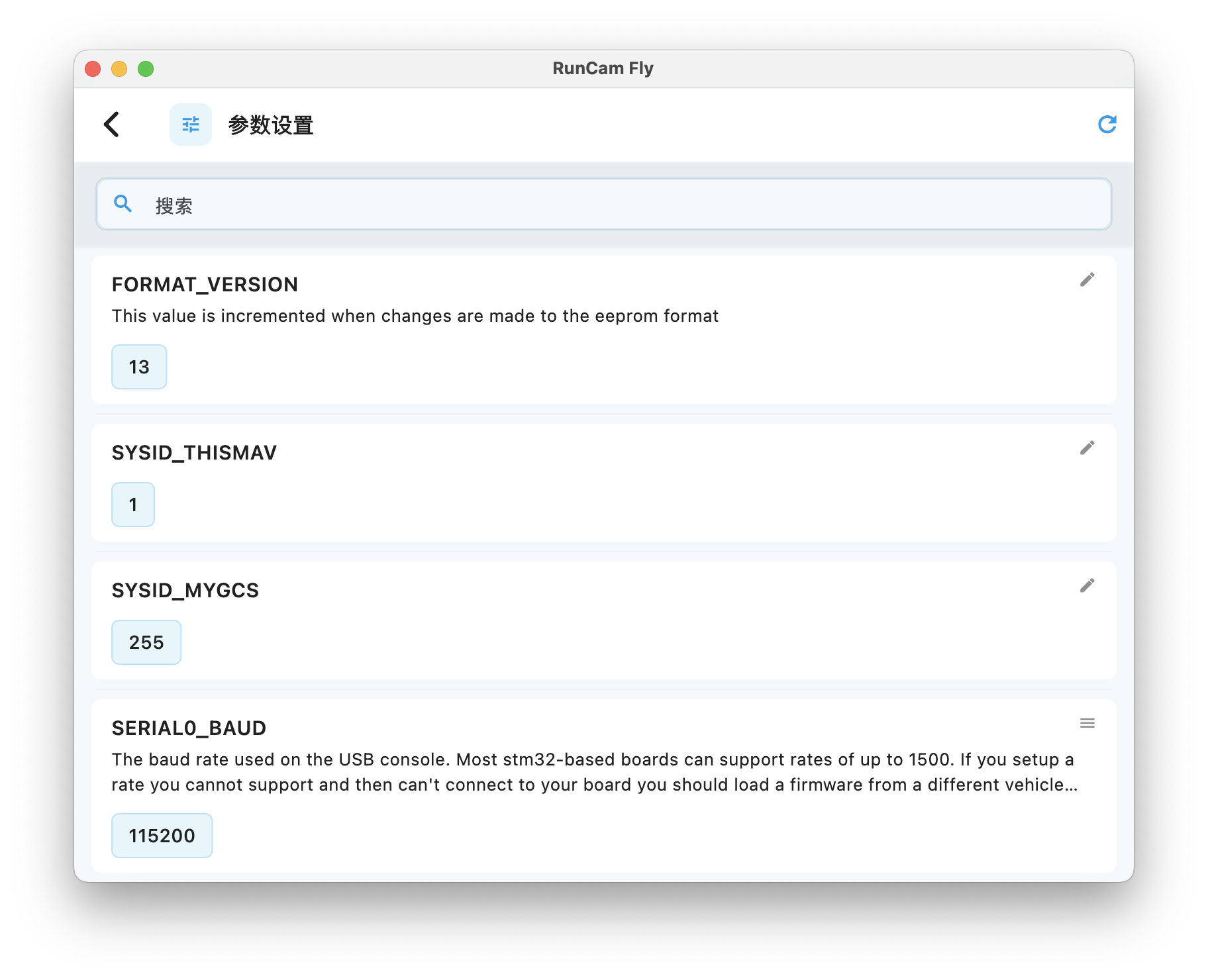
¶ 参数配置--配置飞控参数
支持 MAVLink/CRSF 协议,提供完整的参数配置界面,实时读写 ArduPilot/PX4 飞控参数,搜索修改更迅速。
需使用支持双向mavlink数传的设备
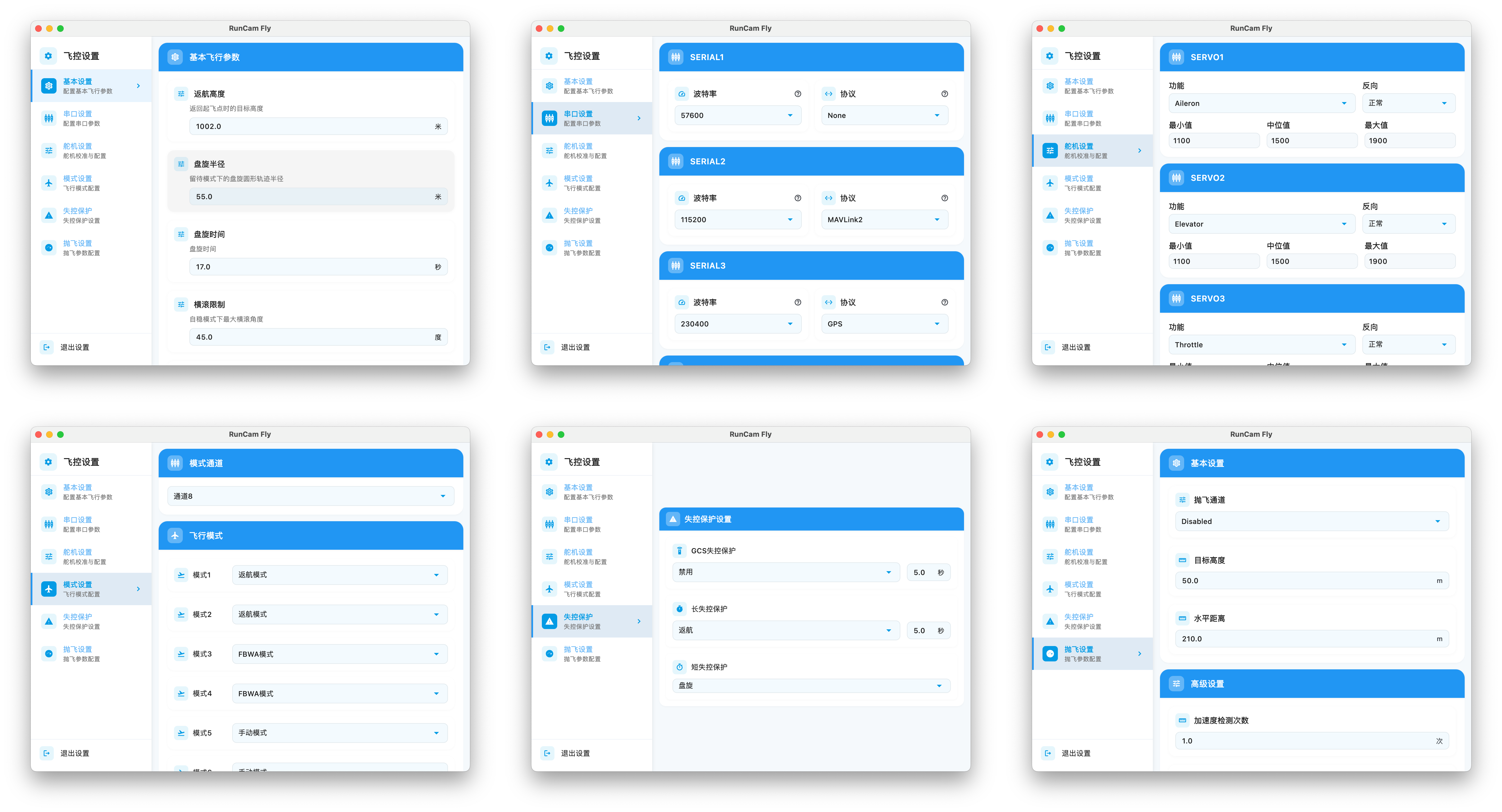
¶ 飞控设置--配置飞控基本设置
可配置飞行参数、飞控串口、舵机校准、飞行模式和失控保护,支持 GCS/长/短失控保护配置,降低飞行风险。并且支持固定翼抛飞配置,一键轻松起飞。
需使用支持双向mavlink数传的设备